随着制造业自动化的快速发展,数控机床上下料机械手系统在提升生产效率、降低人工成本方面发挥着关键作用。本文将系统探讨数控机床上下料机械手系统的设计原则,并深入分析电机及其控制系统的研发要点。
一、上下料机械手系统设计原则
- 安全性原则:系统设计必须以操作人员与设备安全为首要考量。采用多重安全防护措施,包括急停按钮、安全光栅、防碰撞传感器等,确保机械手在异常情况下能够立即停止运行。
- 可靠性原则:机械手系统需具备高可靠性和稳定性,满足连续生产需求。关键部件应采用冗余设计,系统应具备故障自诊断功能,减少非计划停机时间。
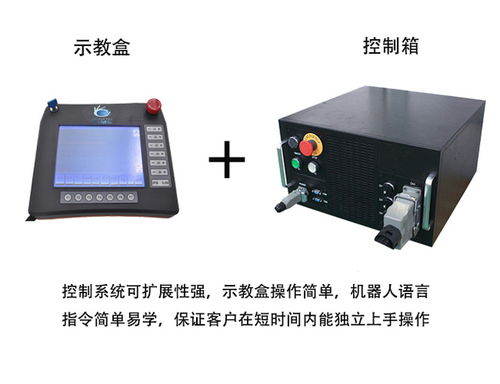
- 柔性化原则:系统设计应适应多品种、小批量的生产模式。通过模块化设计和可编程控制,实现快速换产和工艺调整,提高设备利用率。
- 精度与效率平衡:在保证定位精度的优化运动轨迹和加减速控制,缩短节拍时间,提升生产效率。
- 人机工程学原则:操作界面应简洁直观,便于操作人员快速掌握。维护接口应易于接近,降低维护难度和时间。
二、电机系统选型与设计
- 伺服电机选型:根据负载特性、运动速度和精度要求,合理选择伺服电机类型和规格。重点考虑转矩-转速特性、惯量匹配和过载能力。
- 传动系统设计:采用高精度减速器与电机配合,保证传动精度和稳定性。根据应用场景选择合适的传动方式,如滚珠丝杠、同步带或齿轮传动。
- 热管理设计:针对电机长时间运行产生的热量,设计有效的散热方案,确保电机在额定工况下稳定工作。
三、控制系统研发要点
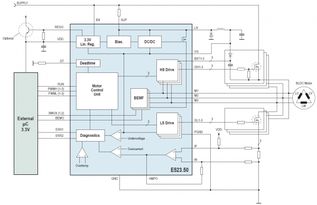
- 控制架构设计:采用分层控制架构,包括运动规划层、伺服控制层和驱动执行层。各层之间通过实时通信协议实现数据交换。
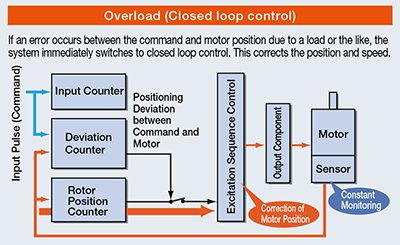
- 运动控制算法:开发高性能的运动控制算法,包括轨迹规划、插补运算和伺服调节。采用前馈控制、自适应控制等先进算法提高跟踪精度。
- 实时性保障:控制系统必须具备严格的实时性,确保指令执行的及时性和准确性。采用实时操作系统和专用运动控制芯片。
- 智能化功能:集成机器视觉、力觉传感等智能感知技术,实现精确定位和力控操作。开发自适应学习算法,提升系统智能化水平。
- 通信接口标准化:采用工业以太网、PROFIBUS等标准通信协议,实现与数控系统、MES系统的无缝集成。
四、系统集成与测试
在完成各子系统研发后,需要进行系统集成和全面测试。包括功能测试、性能测试、可靠性测试和安全测试,确保系统满足设计要求。通过实际生产环境的试运行,不断优化系统性能。
数控机床上下料机械手系统的成功开发,需要统筹考虑机械结构、电机驱动和控制系统的协同设计。只有遵循科学的设计原则,采用先进的技术方案,才能打造出高性能、高可靠性的自动化装备,为制造业转型升级提供有力支撑。